マーリン

photo: 笹目の休日さん
photo: 笹目の休日さん
|
モデル名 |
マーリン Merlin |
|
販売 |
Multilplex |
|
操縦系統 |
エルロン、エレベーター、ラダー、モーターコントロール |
|
翼 幅 |
783mm |
|
機 長 |
598mm |
|
翼面積(FAI) |
11.3dm2 |
|
飛行重量 |
326g |
|
動力 |
Himax 2212-1180アウトランナーブラシレスモーター |
|
RC装置 |
Hitec HS-55サーボ×4 |


発泡素材(エラパーELAPOR)によるキット。やや縦横比の大きい主翼を持ち、電動グライダーと電動プレーンの中間的性格を持つ、ドイツ製品らしい機体です。
このサイズですと、水平尾翼固定、主翼ワンピースが一般的ですが、この機体は主翼2分割、水平尾翼2分割で、保管・運搬時には極めてコンパクトになるのが特徴です。また、巧みに設計された樹脂パーツの組み合わせによって、主尾翼の脱着には工具を一切、必要としないのも大きな特徴です。完成した機体は、分解すればキットの箱にそのまま入ります。
筆者は電動仕様としましたが、キットにはピュアグライダーとしても製作できるように、ノーズコーンが付属しています。下の動画では、スロープソアリングを楽しんでいます。
エラパーのキットは、ゼノに続いて2機目です。取説では、中~高粘度瞬間接着剤と硬化促進剤をしようするように指定されています。エポキシ接着剤では、じゅうぶんな接着力が得られません。筆者は木工用として販売されている中粘度の瞬間接着剤と、OK模型ボンドターボを使用して組み立てました。
主尾翼の取り付け箇所には樹脂パーツを取り付けるようになっています。これが非常によく考えられていて、エレベーターニュートラルや主尾翼のアラインメントが自動的に決まるようになっています。
エレベーターサーボとラダーサーボは、胴体完成後はアクセスできなくなりますので、あらかじめ受信機に接続してニュートラルを出しておきます(舵面側での微調整は完成後も可能です)。
組み立ては特にむずかしいところはありませんが、モーターからの3本のケーブルがローターに接触しやすいので、機首部胴体内側の発泡素材を少し削り、モーターとアンプ間はコネクタを介さずに、ケーブルを直接ハンダ付けし、最短距離(約7cm)としました。サンダーバード18は、プログラムで逆転させられるので、ケーブルをハンダ付けしても問題ありません。
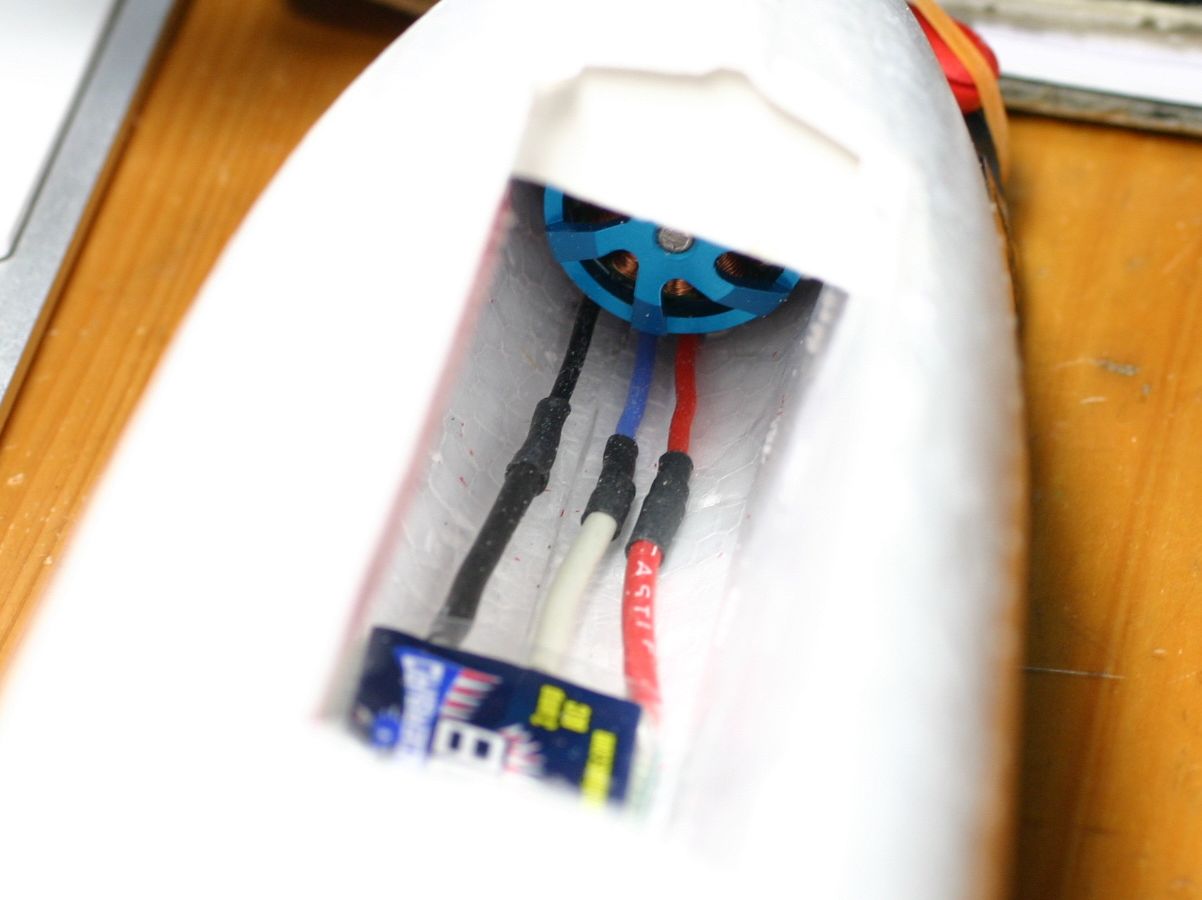
バッテリーコンパートメントはやや幅が狭いので、バッテリーの選定には注意が必要です。
エルロンサーボと受信機を接続しやすくするため、受信機側に7cmのサーボ延長コードを差し、そのコネクタにエルロンサーボからのコネクタを差すようにしました。
キットにはデカールが入っていますが、視認性をよくするため、胴体と主翼を塗装することにしました。水性アクリルカラー(プラモデル用)の赤で機首のキャノピー部を塗装し、主翼上面に赤のストライプを入れました。マスキングテープを使い、ハケ塗りしましたが、一部の発泡粒子の間に塗料がにじんでしまいました。
主翼上面のエルロンサーボの箇所には、薄い白色樹脂プレートを貼るようになっていますが、手持ちの0.3tカーボンシートを貼りました。
発泡の主翼や胴体は、着陸時に硬いものにぶつかるとへこみやすいので、主翼前縁、胴体下面にはスコッチ透明テープ(CC1820-D-J)を貼りました。このテープは適度の粘着性を持つため、ELAPORやEPOにも有効で、はがすこともできます。
2011年2月中旬、初フライトを行いました。重心位置は、前縁から40mm(キット指定)です。まず、軽く手投げしてトリムを確認します。ややダウントリムなので3コマ、アップトリムとします。次にモーターオンで手投げします。予想よりも急角度で、高速で上昇していきます。すぐににスロットルを下げて、水平飛行させます。小さい機体ですが、神経質なところはありません。エルロン、エレベーターの反応は素直です。
この日は中スローでの動力飛行を中心にして5フライトしました。3S640mAhバッテリーで8分、3S1000mAhバッテリーで12分の巡航飛行ができました。
スロットル最スローでもブレーキが効かず、ペラが空転します。帰宅後、キャッスルリンクに接続して設定を確認してみたところ、ソフトブレーキになっていたので、ハードブレーキに変更しました。
2011年2月下旬、2回目のフライトでは、重心位置を44mmに下げ、エレベータートリムを3コマもどしてキット指定の位置にしてみました。飛行は以前よりもフラットになり、またエレベーターのレスポンスが改善されました。RC-Groupsのレビューでは48mmまで下げた、ということです。
アンプのブレーキ設定を変更したため、今回はスロットル最スローでペラが停止しました。しかし、このために抵抗が減少して滑空が伸びてしまい、着陸進入をやり直すことがありました。むしろ、ペラが空転していたほうが沈下率が大きく、着陸は容易です。
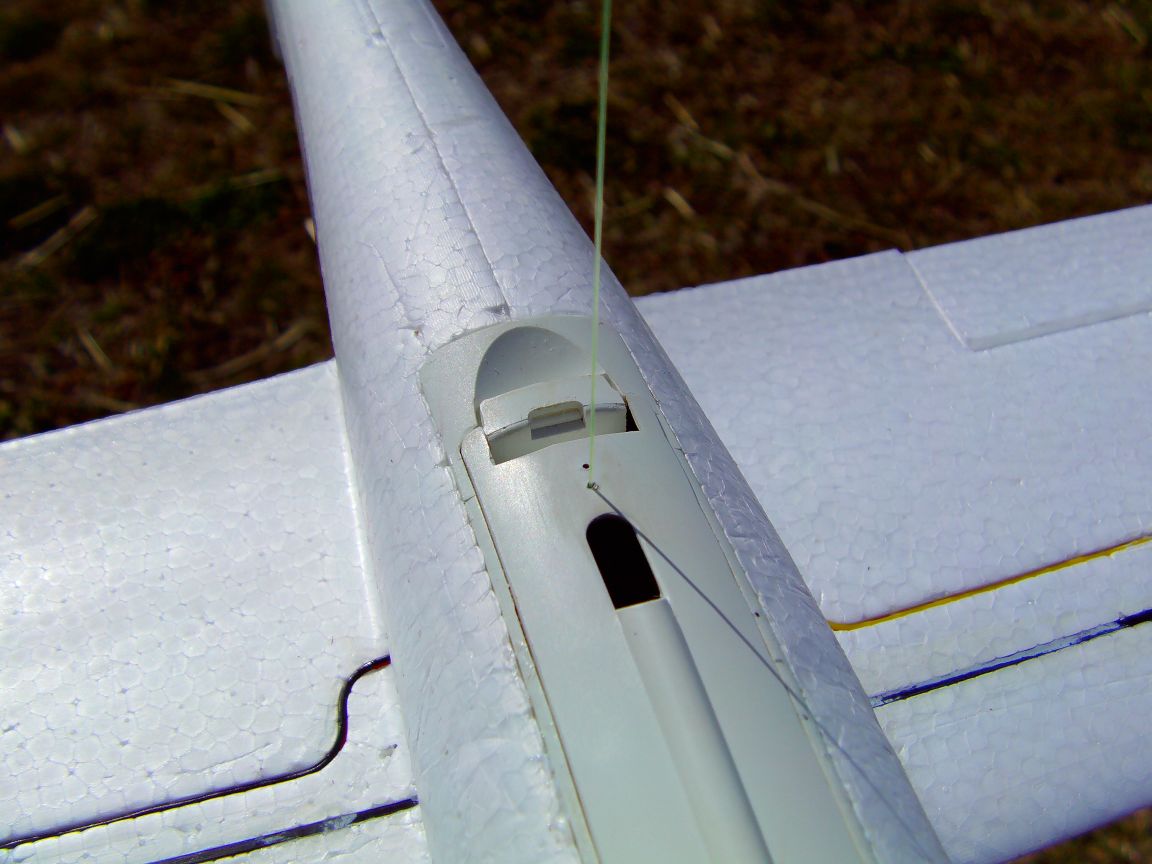
下の写真は、44mm位置にドリルで穴をあけ、テグスで吊り下げて重心位置をチェックしているところです。
この機体でサーマルソアリングを行う場合は、フルパワーで上昇させ、高度をとってモーターを止め、サーマルを探す、という方法では沈下が大きくて楽しめません。ごくわずかに沈下するぐらいの中スロー以下のパワーで飛行させ、サーマルを探す、という方法が適しています。つまり、動力を併用することによって、大型機並みの高揚抗比の滑空飛行をシミュレートするわけです。これは実物のモーターグライダーでも訓練用に行われる方法で、飛行機の巡航飛行とは異なるものです。いったん強いサーマルに入れば、フラッペロンを下げ、モーターを止めてサーマルで上昇させることも可能です。



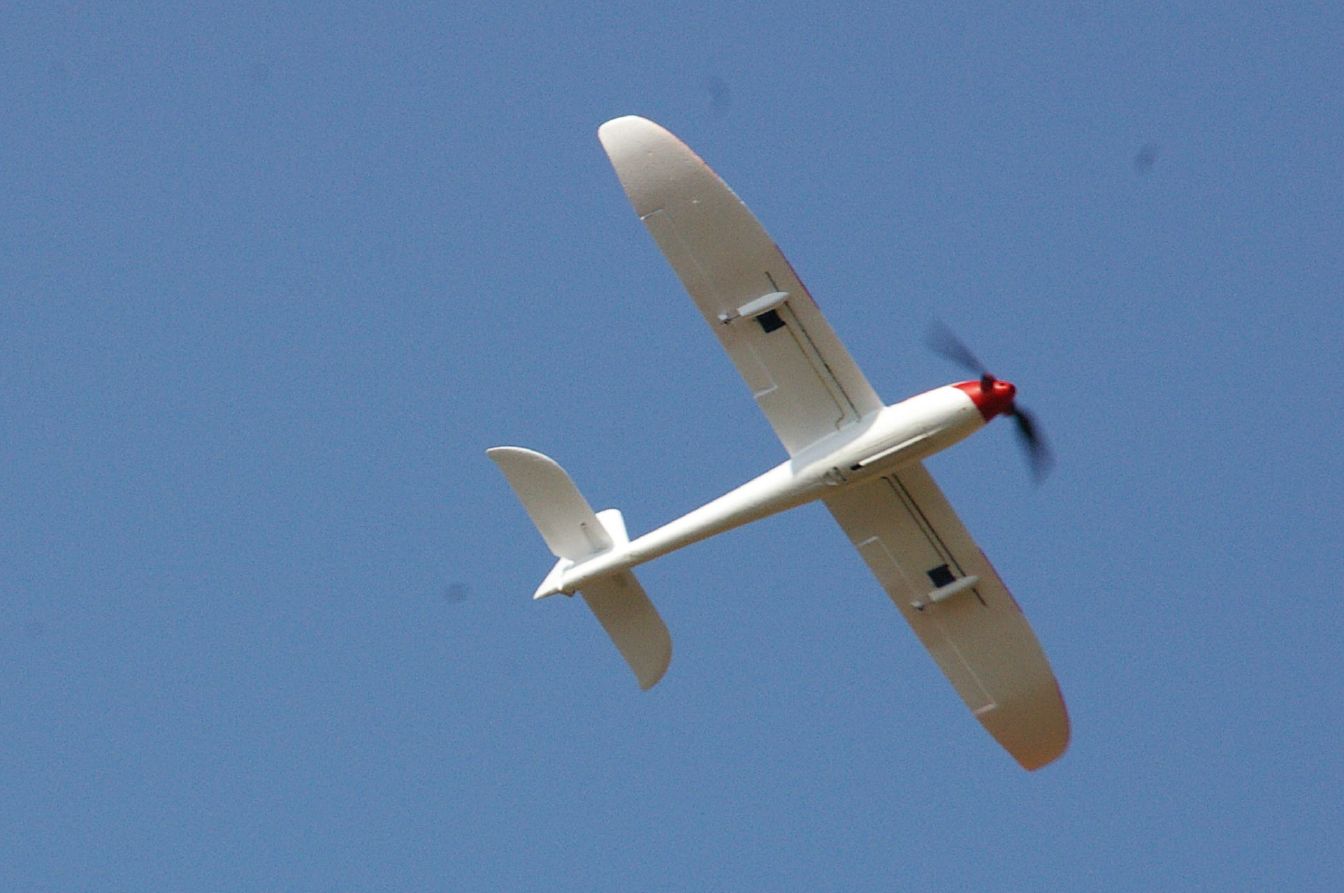
以下の動画は、ハーフスロットルで低空を旋回飛行したものです。minokasagoさんに撮影していただきました。ラストでは、フルスロットルで上昇させています。
2011年8月上旬、久しぶりにS山に行きました。午前11時ごろ、あまり風がないので、本機をモーターオンで発航させました。1分ほど動力飛行させ、リフトを探したところ、左前方の谷の上空に強いサーマルがあり、モーターを止めた状態でも100m以上、上昇させることができました。
S山では、晴れて風が弱い時には谷にサーマルが発生するので、平地と同じようにサーマルソアリングを楽しむことができます。むしろ平地よりも強いサーマルが下方から上がってくる感じです。
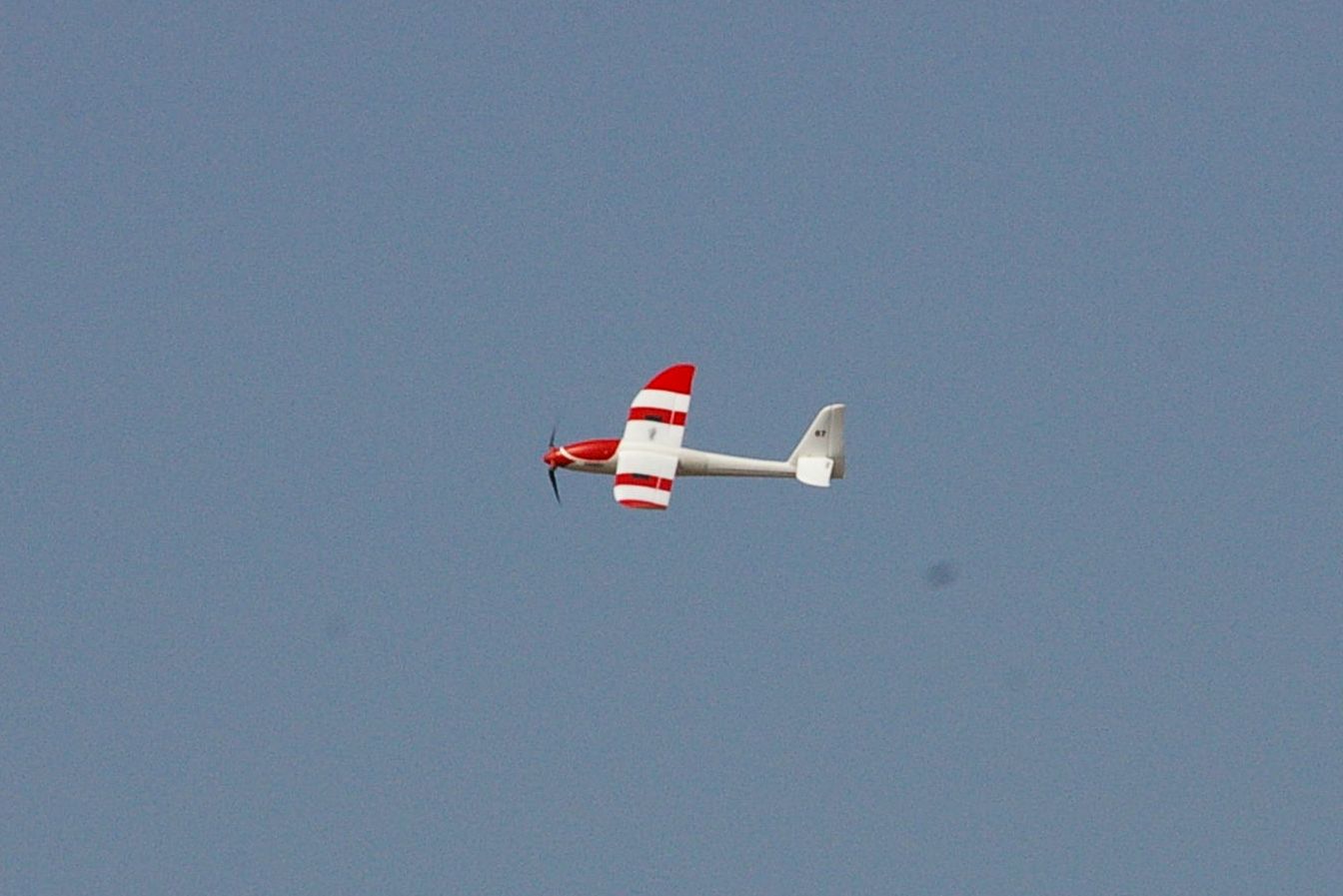
本機は小さいながら、スロープでも楽しめることがわかりました。オールラウンドに飛ばせる機体です。下の写真は、着陸直前をコンノさんに撮影していただいたものです。追い風で対地速度が速くなりましたが、高く茂っている草がクッションの役割を果してくれました。

Hobby Kingから発売されているKinetic 800は、本機とそっくりです。写真で見る限り、水平尾翼の樹脂パーツや、バッテリーカバーなどもよく似ています。本機よりもはるかに安価なので、気になっていましたが、2011年6月に、minokasagoさんが入手されてフライトされたので、現物をつぶさに拝見することができました。
写真でみるとよく似ていたパーツ類は、異なるモールドによるものでした。また、素材はマーリンの発泡素材エラパーよりも、EPPに近いものでした。最大の問題点は、主翼の結合が甘く、ガタが大きいことです。minokasagoさんはアルミ板で補強されていました。また、モーター、アンプも本機の純正パワーパックに比べると�、明らかに非力です。これでは、粗悪な模造品といわれても仕方ない感じです。このKinetic 800、価格が価格ですから、それなりに改良できる経験者には向いていると思いますが、筆者としてはあまりお薦めしません。
last updated: 2011.08.15