
| モデル名 |
Innovator MD530(4720-F) |
| 製造/販売 |
サンダータイガー・田屋エンジニアリング |
| 操縦系統 |
エルロン、エレベーター、ラダー、モーターコントロール、ピッチ |
| ローター径 |
712mm |
| 機長 |
650mm |
| 飛行重量 |
828g |
| 動力ユニット |
S1/3500KVモーター |
| RC装置 |
専用2.4GHzシステム |
400~450クラス電動ラジコンヘリコプター。可変ピッチ。ピッチ操作はメカニカル(ノーマルスワッシュ)です。標準でガバナーモードで飛行します。機体は完全完成で、メインローターを取り付けるだけで飛行可能な状態となります。
この機体を購入した最大の理由は、その安定性にあります。以下のムービーを見て、ちょっとショックを受けました。おそらく無風と思われますが、それでもここまで安定しているのは驚きです。
また、この機体はさまざまな先進的な機能を取り入れ、従来のラジコンヘリにはない安全性と飛行の再現性を持っています。特に標準でガバナーを装備している点がユニークです。「イノベーターinnovator=革新者」のネーミングも納得できます。詳細は公式サイトをご覧下さい。
2008年12月下旬にようやく国内発売となりました。送信機なしセット(4720-A)とJR用2.4GHzモジュール(AQ2271)を購入するつもりでしたが、今回発売されたのは専用送信機付のフルセット(4720-F)のみで送信機なしセットとモジュールは2009年2月になるとのこと。ちょっと迷いましたが、12月末にフルセットと、予備バッテリー(2815)を購入しました(2.4GHzモジュールは2009年6月に国内発売されました)。
セットには完成機体、送信機、専用リポ・バッテリー(11.1V1800mAh15C)1本、充電器、ブレードホルダー、6角レンチ3本、マニュアルビデオCD、デカールが入っています。付属の充電器を使用するには、12Vバッテリーまたは直流安定化電源が必要です(AC電源では使用できません)。
なお、この基本セットで飛行は可能ですが、別売のPCソフトウェア(No. 2708)があるとさまざまな便利な機能が利用できますので、できれば同時に購入されることをお薦めします。
このヘリは400クラスとしては非常に安定していて、ガバナーも安定しているのでホバは容易です。XRB-SRシャトル、SRBクォークの次のステップに適しています。この機体にGyroBot900のビギナーモードが付けば、最強の入門ヘリになると思います。
(1)機体によっては出荷時にピッチが適切でない場合があります。ピッチゲージでチェックしてください。mode 0のとき+2~+10度、mode 1のとき-4~+10度程度が適正です。ロッドの長さで調整します。
(2)機体によってはかなり後ろ重心のことがあります。スタビライザーを機軸に対して90度にして保持し、ほぼ水平になるように、機首に板鉛などを取り付けます。
(3)バッテリーはしっかり奥まで差し込みます。特に取り外しレバーが邪魔しないように注意します。
(4)バッテリーを取り付けても、低音のビープが鳴って起動しないときは、エンコントリムを2~3コマ下げます。
(5)このヘリは標準でガバナーモードで飛行しますので、飛行中、エンコンを最スローにしていはいけません(いったんモーターが停止すると、再始動までに数秒かかります)。
2.1. メインブレード
まず、メインブレードのバランスをチェックします。MD530のブレードは硬質発泡スチロールと思われるローターの前縁に合成ゴムが貼ってあります。安全性への配慮と思われます。重量バランスはほぼ合っており、2枚の重心位置も合っていました。
ドラッグボルトの締め具合は微妙です。やや緩いかな、と思うぐらいがよいようです。硬すぎるとコントロールしにくくなります。
2.2. 重心
筆者の機体は、スタビで保持してみると、かなり後ろ重心です。機首に約25gの板鉛をテープ止めしました。
2.3. 動作チェック
次に「クイックスタートガイド」に従って、メカの動作確認をします。
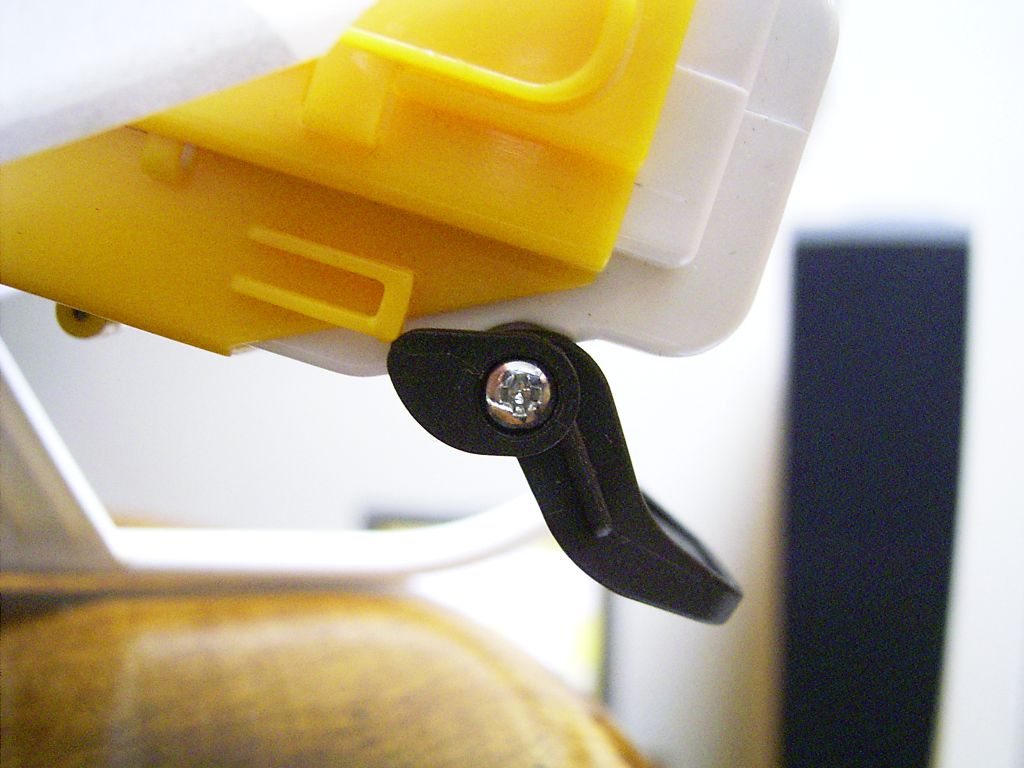
まず胴体後方下面のカバーを外し、モーターケーブルを引き出して2本を外します。送信機の電源をオンにし、充電したバッテリーを機体にセットします。ここでトラブル。ロングトーンのビープが鳴ってしまって、エラーとなります。何回か試みて、1回は成功しましたが、その後はまたエラーです。しばらくあれこれ試行錯誤しましたが、原因はバッテリーの取り付け方でした。バッテリーをトレーに差し込むときに、しっかり奥まで差し込まないと、バッテリーを正常に認識できずにエラーとなるようです。また、バッテリーについているリリースレバーの位置に注意しないと、レバーの先端がトレーにあたって、バッテリーがじゅうぶん奥まで入らないことがあります。レバーが下の画像の状態で差し込みます。黒いレバーが動きやすいので、左右のネジを締めました。

下の画像はバッテリー(白)がブラケット(黄)に正しくセットされた状態です。

下の画像は、リリースレバーがブラケットの突起に当たってバッテリーが充分奥まで入っていない状態です。この状態ではロングビープが鳴って起動できません。
2.4. バインディングとキャリブレーション
次にモーターケーブルを接続、カバーをテープ止めし、メインローターを取り付け、スキッドをパーチクルボードにゴムバンドで固定します。ここで付属ビデオCDにしたがってバインディング、送信機キャリブレーション、サーボ・キャリブレーションを行いました。サーボキャリブレーションでは、システムが自動的に各サーボを順にゆっくり動作させ、ニュートラルで停止させます(数分間かかります)。
2.5. ピッチ角調整
この段階でピッチ角をチェックしておきます。取説に明記されていませんが、ホバリングと上空前進飛行には、モード0(1500RPM、室内または無風屋外用)ではプラス2度~プラス10度、モード1(1700RPM、2~3m/s程度の風の屋外用)ではマイナス4度~プラス10度ぐらいがよいようです。
2.6. 起動
いよいよ起動です。以下の手順で行います。
(1)スロットルスティックを最スローにして送信機をオン。
(2)機体にバッテリーを取り付けます。ビープが「ピー、ポー、ピー」と鳴った後、「ピッピッピッピッ・・・」と鳴ればOKです。もし「ピー、ブー、ピー、ブー」とロングトーンが連続する場合はエラーですので、スロットルトリムを数コマ下げます。それでもロングトーンが鳴る場合には、バインディングをやり直すと正常に起動できるようになります。
なお、バッテリー電圧が12.2V未満ですと機体は「ブー、ブー、ブー・・・」とロングトーンのビープを出して起動しません。これは使用済み(フライト済み)のバッテリーを未使用と勘違いしてフライトするミスを防止する機能です。ただし、後述のPCソフトウェアによって、この起動電圧を変更することができます。
(3)ここでエルロン、エレベーター、ラダーを動かしてみます。
(4)胴体後ろ上面にある、赤いスタートボタンを長めに押します。すると、エンジンスタートのような効果音が出ます。これが「ピピピピ…」という速いビープ音になればフライト準備OKです。スロットルを10%ほど上げるとローターが回転を始めます。なお、この機体のメインローターはガバナー制御ですので、ローターの回転が安定するまで数秒、待つ必要があります。ガスカーブのようにスロットルをすぐに上げて離陸してはいけません。デフォルトでは、送信機右肩のスイッチのポジション0で1500RPM(インドア用、無風屋外用)、ポジション1で1700RPM(屋外用)に設定されています。
FDK R/C事業部 >イノベーター
イノベーターを販売しているオンラインショップのページ。イノベーターの調整に関する最新情報、アドバイスが掲載されています。
2.7. 専用送信機TS6
セット付属の専用送信機TS6はシンプルですがよく考えられています。
送信機の重要なポイントのひとつにスティックの長さとテンションがあります。筆者は短めのスティック、弱めのテンションが操縦しやすいのですが、この点でTS6は短めのスティックでテンションは調整可能ですので、操作しやすく感じます。また、手で持ったときのバランスも問題ありません。
ただ、プロポストラップを付ける部分が樹脂製でやや狭いので、金属リングを取り付けて使用しています。
2008年12月下旬、初フライトしました。当日は平均2.6m/s、瞬間最大4m/sの北風で、初フライトにはちょっと強い風です。ホバリングしようとしましたが、風のせいか、トリムがとれていないせいか、浮かそうとすると機体がすぐに傾いてしまいます。そこでヘリエキスパートのS田さんにトリムを見ていただくことにしました。
エルロンは左3コマで合いましたが、エレベーターがフルダウントリムでも、まだダウンを押す必要があるとのことで、ボディを外してエレベーターロッドを2mmほど伸ばしました。その結果、エレベータートリムも取れ、2パック目には筆者もホバできました。音が静かで、舵には素直に反応する感じです。
3パック目には、再びS田さんに飛ばしていただき、写真撮影をしました。ピッチカーブがちょっと合っていないとのことでした。

3.2. フライト2日目
初フライトの翌日、やはり3~4m/sの風の中でホバしてみました。まずリンケージロッドを3回転分伸ばしてピッチを下げ、フライトを行いました。今度はスロットルスティック位置に対してピッチが低すぎの感じなので、すぐに着陸させ、1回転分ロッドを短くして再度ホバしてみたところ、だいぶ飛ばしやすくなった感じです。
風がほとんどなくなったので、この設定でさらに2フライトしました。3フライト目にフライトモード0で6分30秒ホバした直後のバッテリー電圧は11.39Vでした。
リポは、新品のうちはギリギリまで放電させるよりも、控えめに使用して慣らしをした方が寿命が延びるので、各パックとも、あと2~3フライトは無理をせず、早めに着陸させるようにしようと思います。
3.3. その後
1月下旬、ようやく風の弱い日にホバできました。モード0(1500RPM)のときは舵の効きが弱く、ちょっと操縦しにくい感じがします。また回転数に対して最大ピッチもちょっと足りない感じで、ときどきステイックをフルハイにすることもありました。モード1(1700RPM)はちょうどよい感じです。屋外で飛ばすときはモード1がよさそうです。
2月下旬、平均3m/s、瞬間最大4m/sの風の中でフライトしてみました。機体の調整がとれてきたこと、機体に慣れてきたこともあって、エレベータートリム3コマダウンで安定してホバでき、水平8字飛行も問題なくできました。着陸時にも安定していて、感覚的にはひとまわり大きいEP-8を飛ばしているような感じです。スケールボディも姿勢がわかりやすく、飛ばしやすい感じです。
無風時や屋内でのホバリングの安定性はSRBクオークが上ですが、2m/s以上の風のある屋外ではイノベーターMD530の方がはるかに安定していて、ホバが容易です。
3月上旬、気温6度の寒い日にモード1でホバリングと上空飛行を行いました。2フライト目に、パーカのフードをかぶっていたため7分に設定したタイマーが聞こえず、そのままフライトを継続してしまい、8分30秒でバッテリー残量警告(テールを短く右に2回振る)が出ました。
2009年1月上旬、PCソフトウェア(No. 2708)が発売されましたので、早速、入手しました。このソフトをWinパソコンにインストールし、付属のUSBケーブルでヘリのコントロールユニットとパソコンを接続することにより、さまざまな設定やフライトログのチェックが可能となり、また機体の設定データをFMSシミュレータ用のファイルとして書き出し、FMSで確認することもできます。
イノベーターでは、従来はプロポ側で行っていたデュアルレート、エクスポ、ピッチカーブ、スロットルカーブ、ガバナーゲインなどの設定がすべて機体側にメモリーされます。機体にはあらかじめ標準的な設定データがインストールされていますが、PCソフトウェアを用いて変更することができます。またこれらのデータをPCソフトウェアで取り出してファイルとしてパソコンに保存でき、逆に既存のファイルを機体メモリーに転送することもできます。今後、フライトスタイルやレベルに合わせて各種設定ファイルが提供されるようになると考えられます。
JRやフタバのモジュール方式コンピュータプロポに、2.4GHzモジュール(フタバ用AQ2254、JR用AQ2271)を取り付ければ、従来通り、プロポ側で設定することも可能です。この方式ですと現場で設定が簡単に変更できます。
以下のスクリーンショットは、このソフトの機能の例です(画像をクリックすると拡大されます)。
4.1. システム設定>機体情報選択
モータータイプ、ギア比などの機体のデータが表示されます。

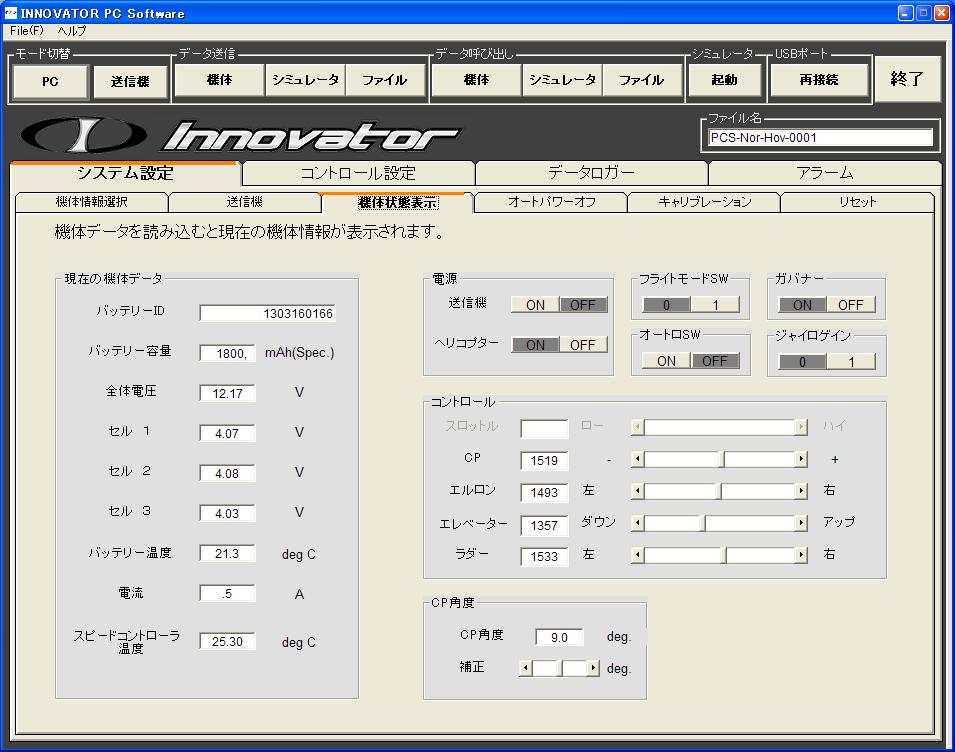
4.2. システム設定>機体状態表示
現在の機体の状態とバッテリーの状態が表示されます。
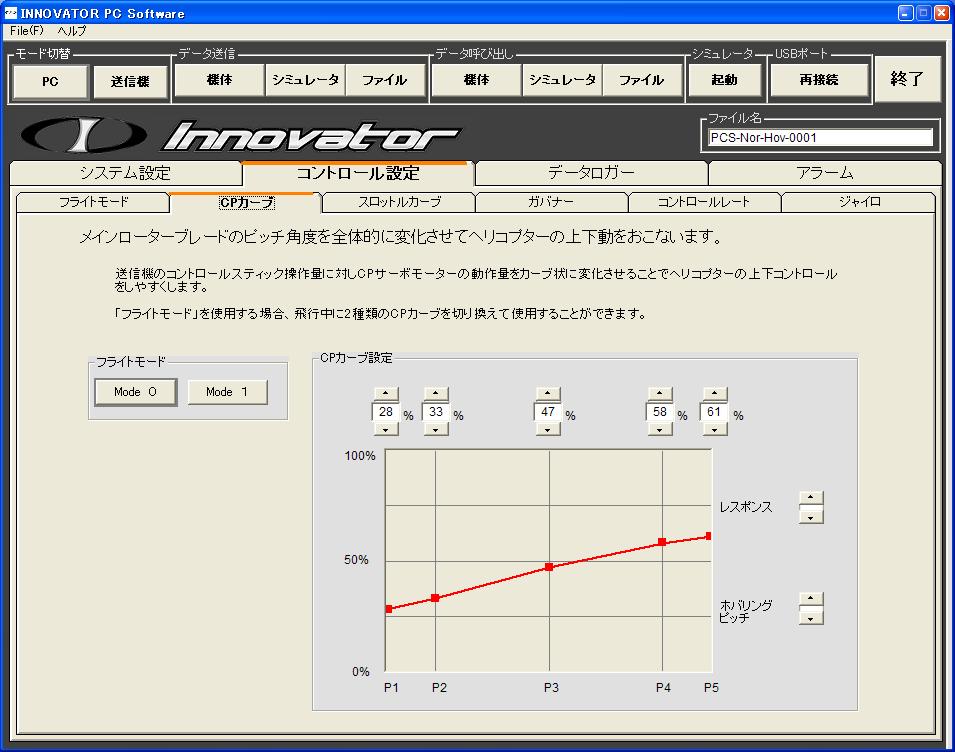
4.3. コントロール設定>CPカーブ
可変ピッチのピッチカーブが表示されます。
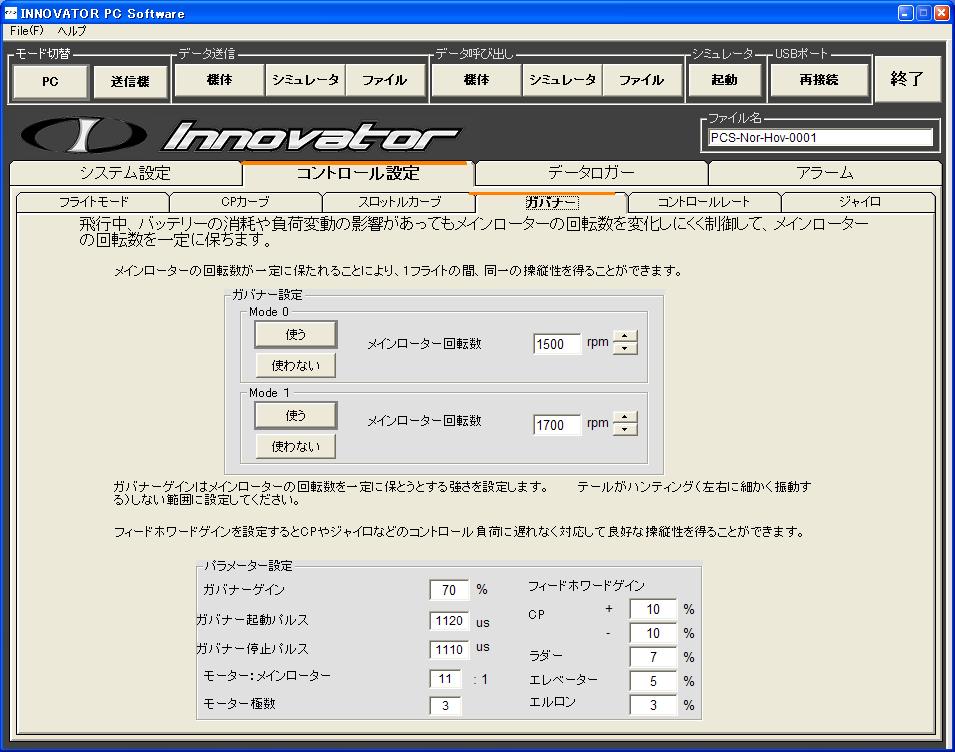
4.4. コントロール設定>ガバナー
ガバナー(ピッチが変化してもメインローター回転数を一定に保つ方式)の設定が表示されます。注目されるのは右下の「フィードフォワード」で、これはサーボやジャイロの動作による電圧降下が動力系に及ぼす影響を少なくするためのものです。
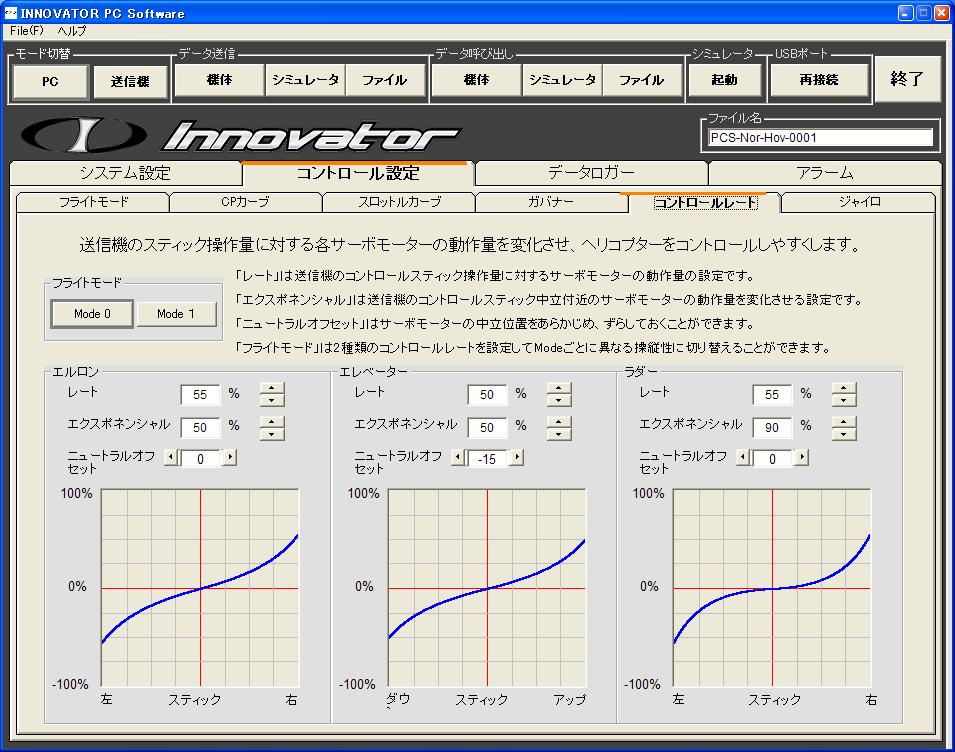
4.5. コントロール設定>コントロールレート
エルロン、エレベーター、ラダーのデュアルレート、エクスポネンシャルが表示されます。デュアルレートとエクスポによる動作量がひとつのグラフで表示され、直感的にわかりやすくなっています。
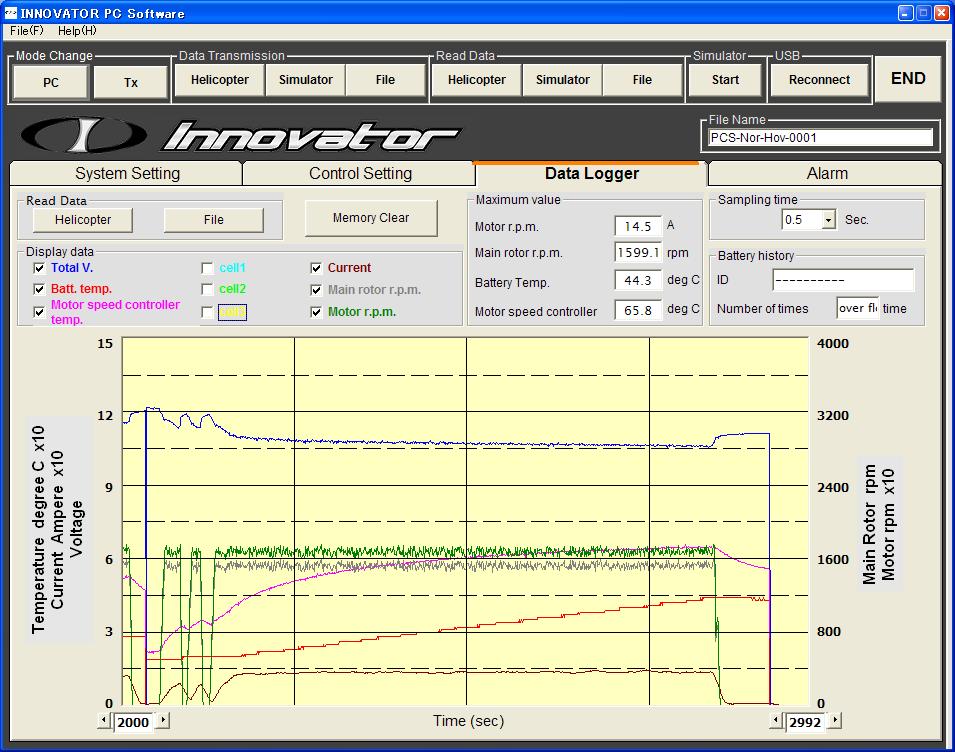
4.6. データロガー
イノベーター本体のコントロールユニットには標準で飛行中の電流値やモーター回転数など9項目を記録するデータロガー機能が搭載されており、PCソフトウェアによってそのデータをパソコンに取り込み、グラフ表示させることができます。下の画像は、約7分、アイレベルでホバリングしたときのログです(グラフを見やすくするため、表示項目を少なく設定しています)。ガバナーが安定していることがよくわかります。最初、トリムをとるため2回着陸させ、その後、継続してホバしています(画面は英語表示ですが、日本語表示も可能です)。
PCソフトウェアの設定データ(PCS-Nor-Hov-0001)をFMS用のファイルに書きだし、FMSでシミュレートしてみました。筆者はWindows-XPノートパソコンを使用していますが、PCソフトウェア付属のFMS 2.0 Alpha 8.5は動作しないため、FMS 2.0 Beta 7で試してみたところ、サウンドは出ませんがシミュレーションはできました。

PCソフトウェアにはイノベーターEXPのデータ(PCS-Nor-Sport-0001)も入っていましたので、FMSでシミュレートしてみました。MD530に比べて運動性が高く、舵の反応も敏感です。
ただし、FMSのヘリは実物よりも操縦が容易です。たとえば、多くのヘリは離陸時にわずかに左に流れますが、FMSではまっすぐに離陸してしまいます。このため、初心者の場合、FMSでホバリングができても、実物のイノベーターではホバがむずかしい、というケースも考えられます。
2009年6月下旬、FDKさんよりJR用送信機モジュール(AQ2271-J)を購入し、PCM-9Xに取り付けてみました(このモジュールはPCM12Xには使用できません)。以下は筆者が試行錯誤してなんとか飛ばせるようになった手順です。
以上でとりあえずはPCM-9Xでフライトが可能となります。スロットルホールドも機能します。これで飛行場でもパソコンなしで舵角、ピッチカーブ設定ができ、デジタルトリムやタイマーが使用できるので、専用送信機TS6よりも格段に飛ばしやすくなります。筆者は試していませんが、ガスカーブモードにすれば、スロットルカーブも送信機で設定できると思います。
ただしフライトモード切り替えはチャンネル5で行うようになっているので、ギアスイッチを使用することになります。PCM-9Xのフライトモードスイッチでは、舵角とピッチカーブは設定/切り替えができますが、ガバナー回転数の切り替えはチャンネル5(GEARスイッチ)でしか切り替えできません。またガバナー回転数とジャイロ感度は送信機側からは設定できないようで、これらの設定変更にはPCソフトを使う必要があります。
なお、上記3で「送信機」に切り替えずにPCM-9Xを使用することも可能です。この場合、各種設定はPCソフトを用いて機体メモリに記憶させ、PCM-9Xは初期状態で使用します。つまりPCM-9XをTS6として使用することになります。これではコンピュータプロポの意味がありませんが、フライトは可能です。
PCM-9Xでホバしている動画です。午前9時ごろ、微風ですが、けっこう空気は動いているようです。舵はもう少し敏感にしてもよさそうです。終わりの方(1:58)で、テールが2回短く振れるのはバッテリー電圧低下のアラートです。
2009.12.29